
Projects
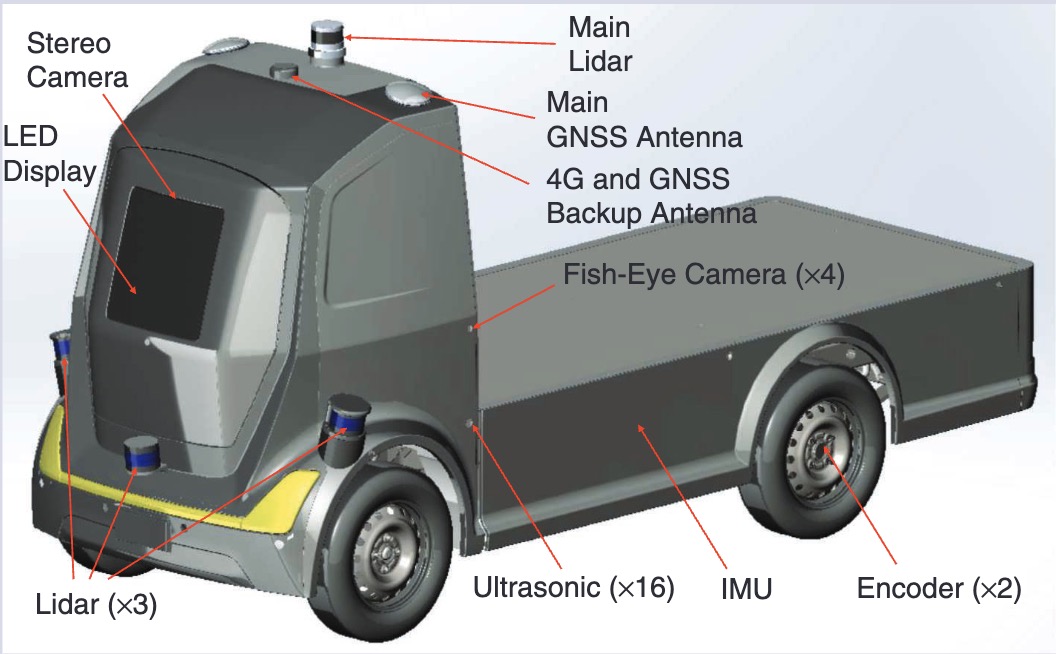
- UGV Localization Algorithm Development
Led the development and testing of UGV localization algorithms. Successfully deployed on over 200 vehicles in various scenarios.
(October 2018 – October 2021)

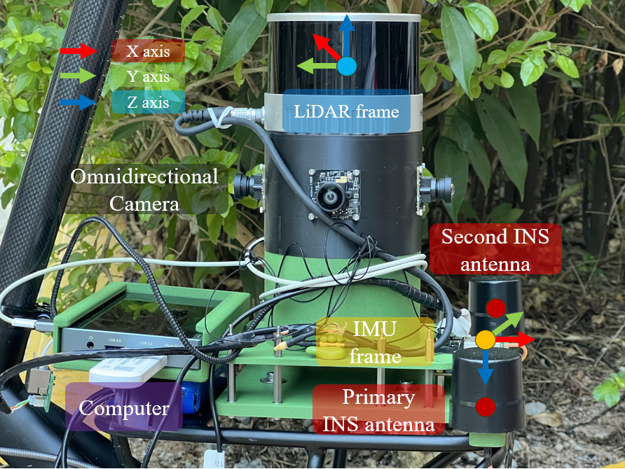
- LiDAR-Inertial Mapping Device
Designed a tightly coupled LiDAR-inertial mapping system, including hardware architecture and full sensor calibration.
(March 2023 – October 2023)
- LiDAR-Inertial Localization System
Implemented a localization pipeline based on LiDAR-inertial fusion using a prior map for long-term operation.
(February 2023 – December 2023)

- Bike-Based Long-Term Urban Dataset
Collected a large-scale urban dataset using a bicycle platform to support dynamic map update research.
(October 2023 – June 2024)
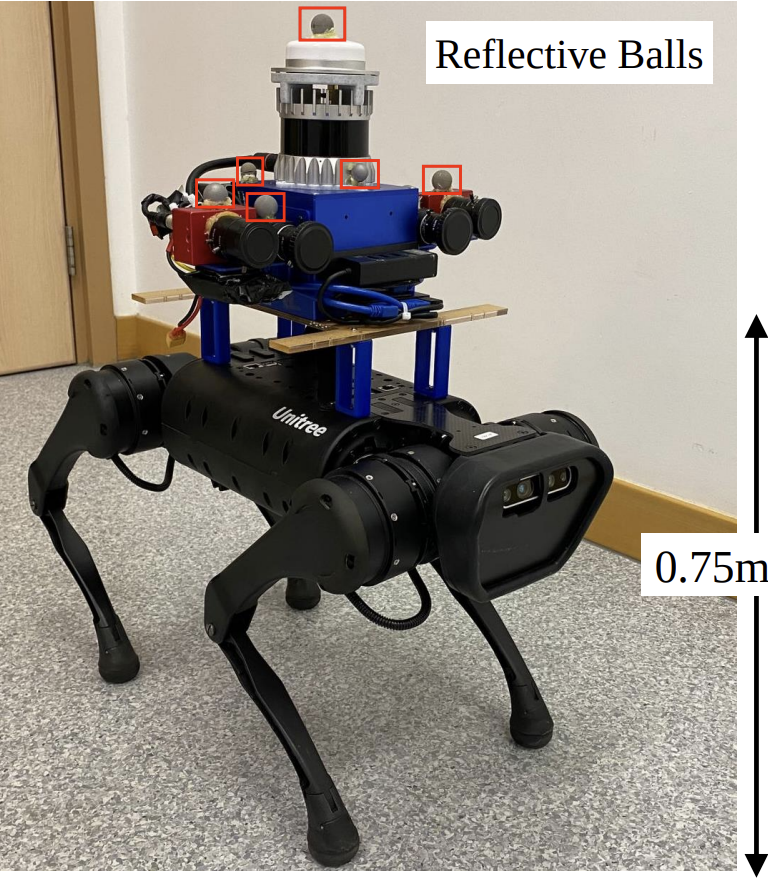
- Fusion-Portable Dataset Collection
Built a mobile platform using quadruped robots. Contributed to sensor selection, FPGA synchronization, and full hardware design.
(December 2021 – September 2022)

- GNSS-Denied Localization in Harbor Environments
Developed a LiDAR-based pillar localization system for harbor scenarios, fused with visual and inertial systems for robustness.
(July 2019 – October 2020)

- Mapping Vehicle Platform Design
Designed hardware architecture and mapping pipeline using Novatel CPT INS for high-precision mapping.
(March 2019 – July 2019)
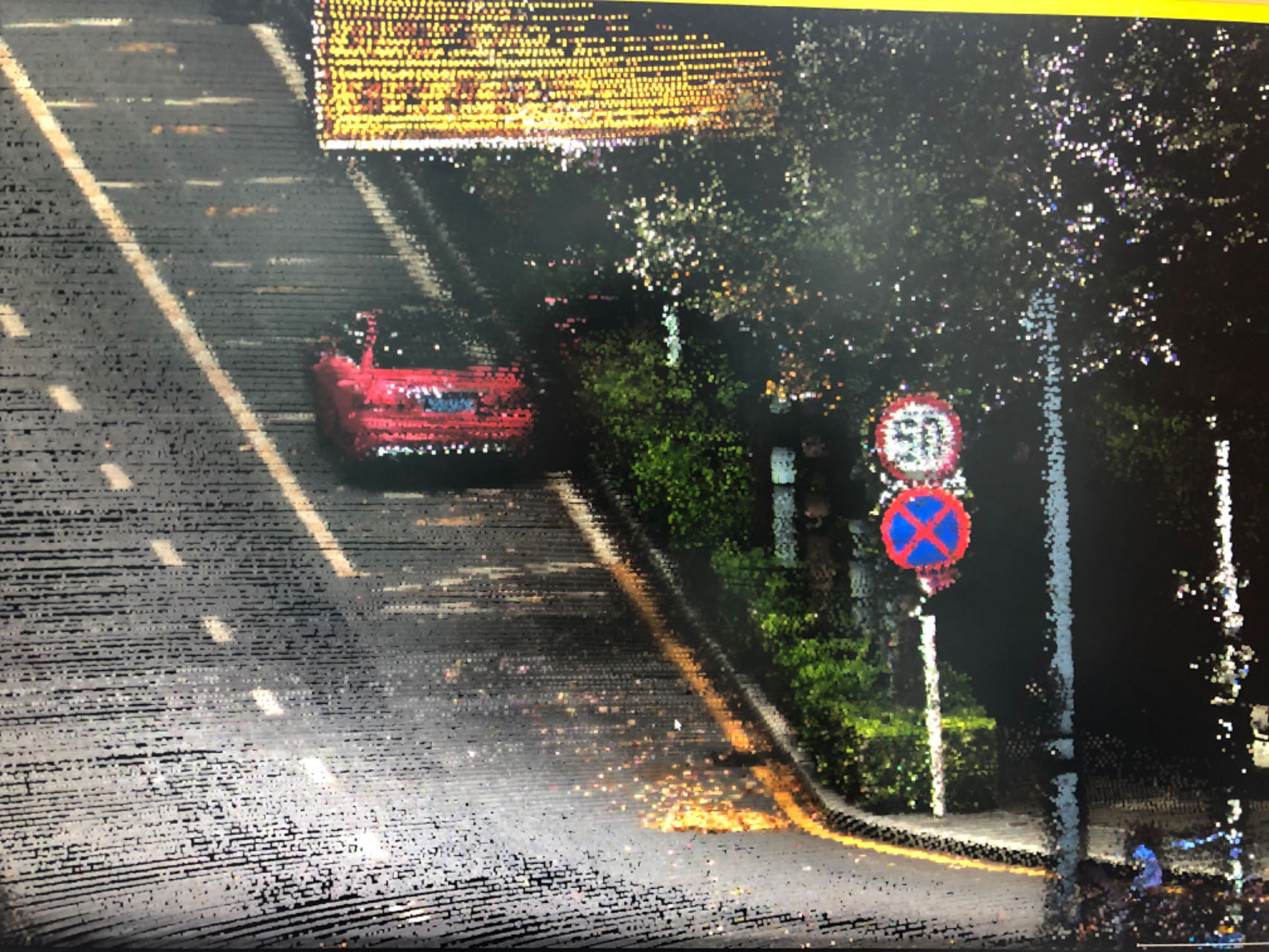
- Multi-Sensor Fusion Mapping (LiDAR + Camera)
Designed hardware and performed accurate synchronization and calibration for camera-LiDAR fusion mapping.
(December 2019 – August 2020)
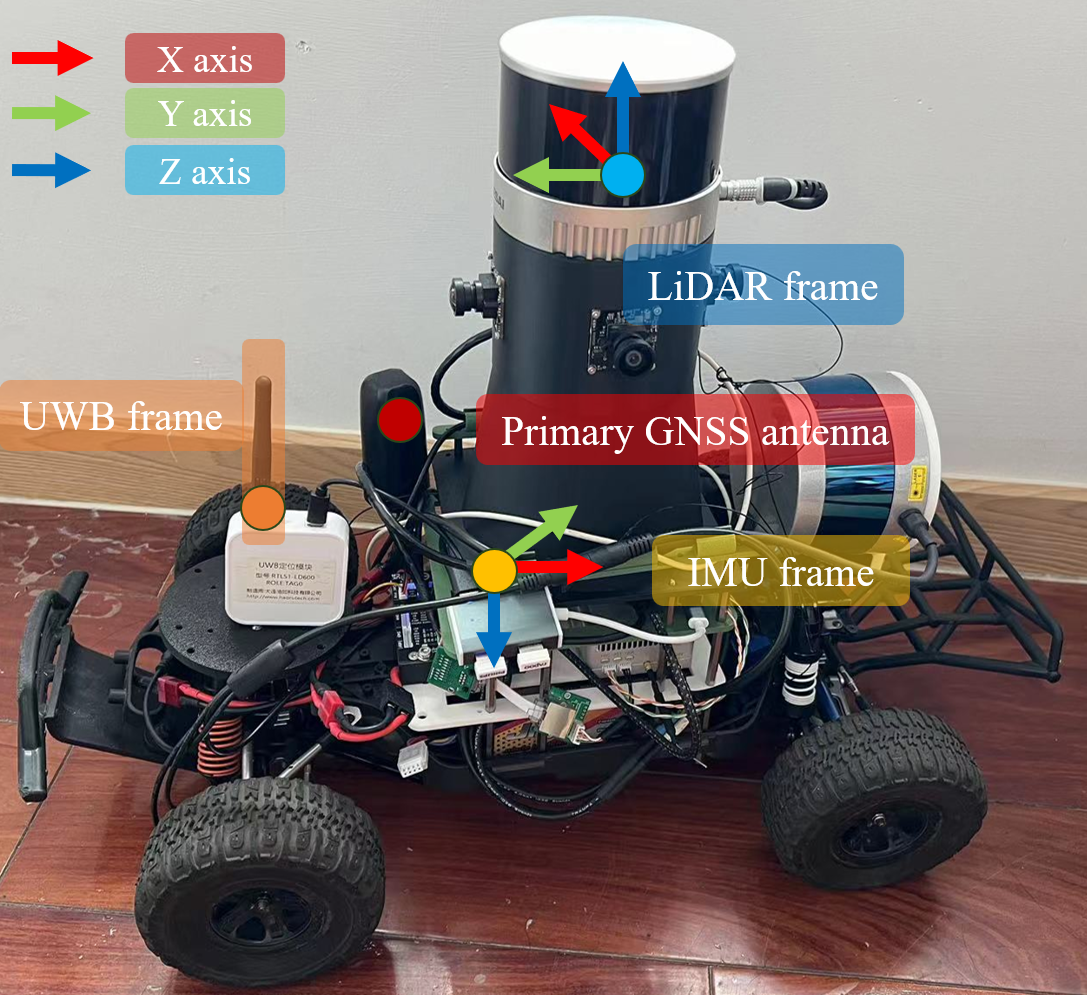
- UWB-Aided LiDAR-Inertial Localization
Addressed LiDAR degeneracy in tunnel-like environments by integrating UWB anchors into the localization system.
(March 2023 – December 2023)

- Meta Project Aria
Contributed to localization algorithm development for wearable AR devices in collaboration with Meta.
(March 2024 – Present)
