
Journals
- Efficient Camera Exposure Control for Visual Odometry via Deep Reinforcement Learning
IEEE Transactions on Instrumentation and Measurement, 2025
Authors: X Hu, J Wu, B Xue, Zhu, Yilong, M Jia, Y Qi, Y Jiang, P Tan, W Zhang;
- AM-Align: Globally Optimal Estimation of Accelerometer-Magnetometer Misalignment
IEEE/ASME Transactions on Mechatronics, 2024
Authors: Zhang, Shuyang; He, Jinhao; Yang, Bowen; Zhu, Yilong; Wu, Jin; Jiao, Jianhao; Yuan, Jie;
- Efficient Camera Exposure Control for Visual Odometry via Deep Reinforcement Learning
IEEE Robotics and Automation Letters, 2024
Authors: Zhang, Shuyang; He, Jinhao; Zhu, Yilong; Wu, Jin; Yuan, Jie;
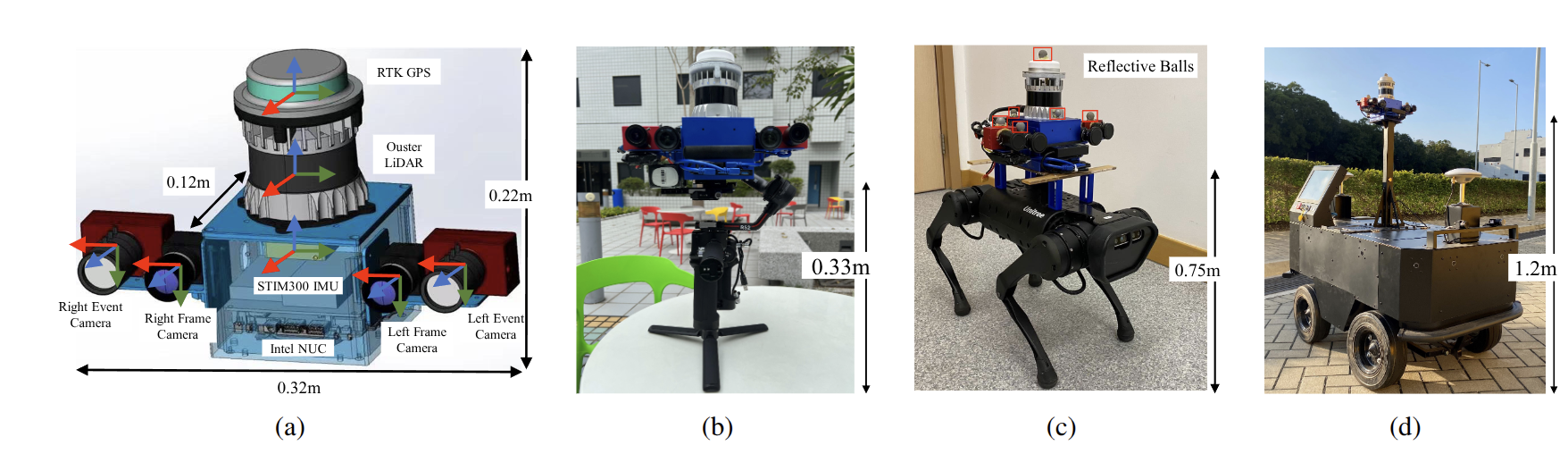
- Fusionportablev2: A unified multi-sensor dataset for generalized slam across diverse platforms and scalable environments Link
The International Journal of Robotics Research, 2024
Authors: Wei, Hexiang; Jiao, Jianhao; Hu, Xiangcheng; Yu, Jingwen; Xie, Xupeng; Wu, Jin; Zhu, Yilong; Liu, Yuxuan; Wang, Lujia; Liu, Ming;
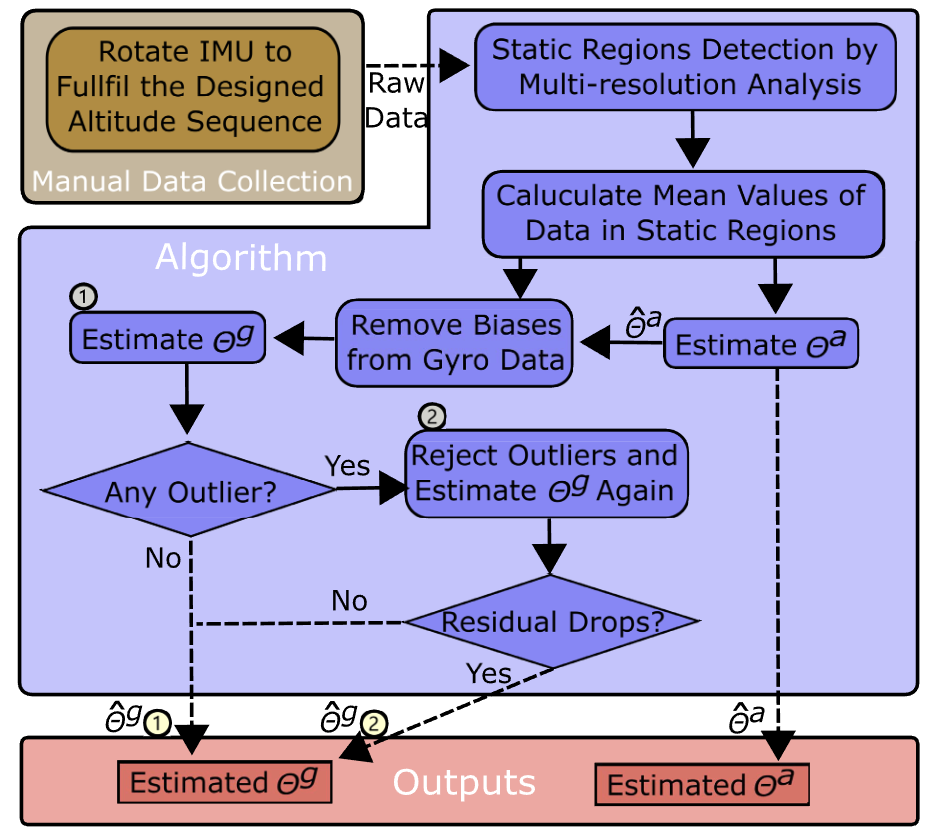
- Robust equipment-free calibration of low-cost inertial measurement units
IEEE Transactions on Instrumentation and Measurement, 2023
Authors: Zou, Zuhao; Li, Liang; Hu, Xiangcheng; Zhu, Yilong; Xue, Bohuan; Wu, Jin; Liu, Ming;
- Generalized n-Dimensional Rigid Registration: Theory and Applications
IEEE Transactions on Cybernetics, 2022
Authors: Wu, Jin; Wang, Miaomiao; Fourati, Hassen; Li, Hui; Zhu, Yilong; Zhang, Chengxi; Jiang, Yi; Hu, Xiangcheng; Liu, Ming;
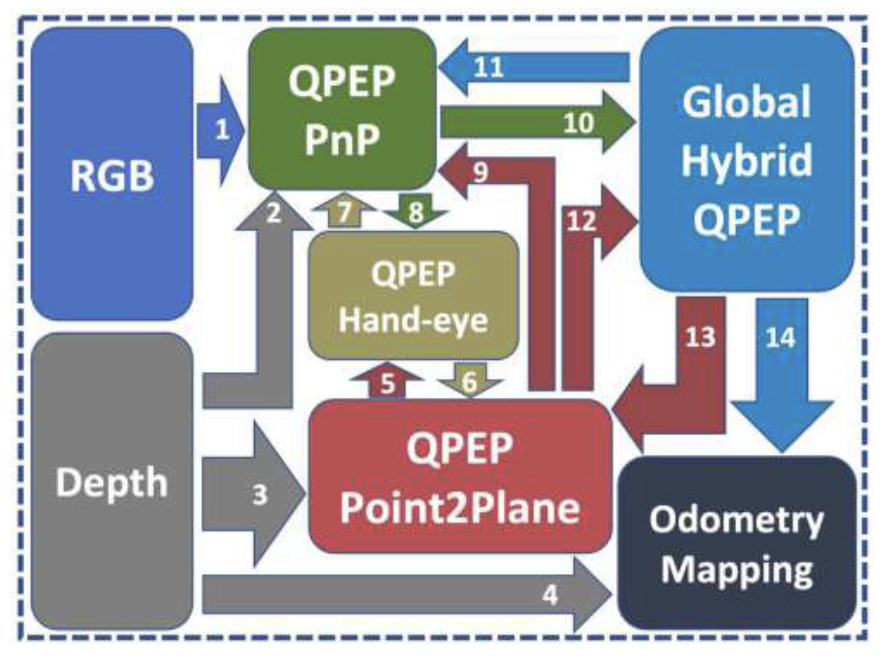
- Quadratic pose estimation problems: Globally optimal solutions, solvability/observability analysis, and uncertainty description
IEEE Transactions on Robotics, 2022
Authors: Wu, Jin; Zheng, Yu; Gao, Zhi; Jiang, Yi; Hu, Xiangcheng; Zhu, Yilong; Jiao, Jianhao; Liu, Ming;
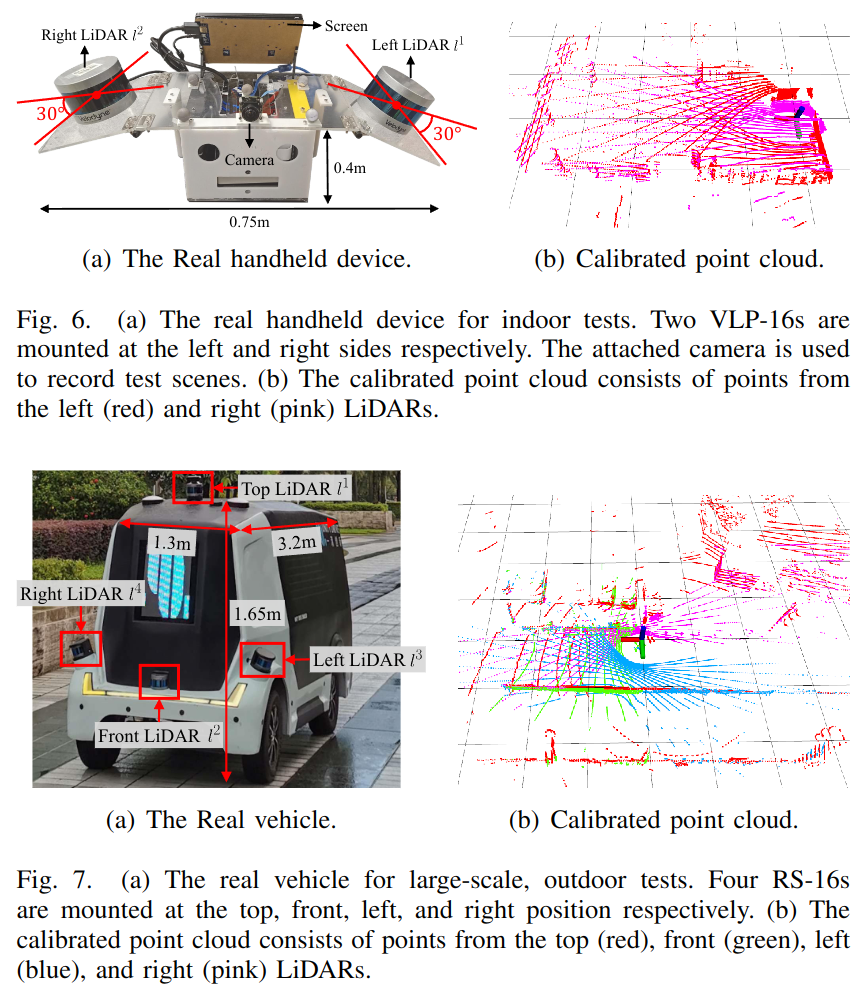
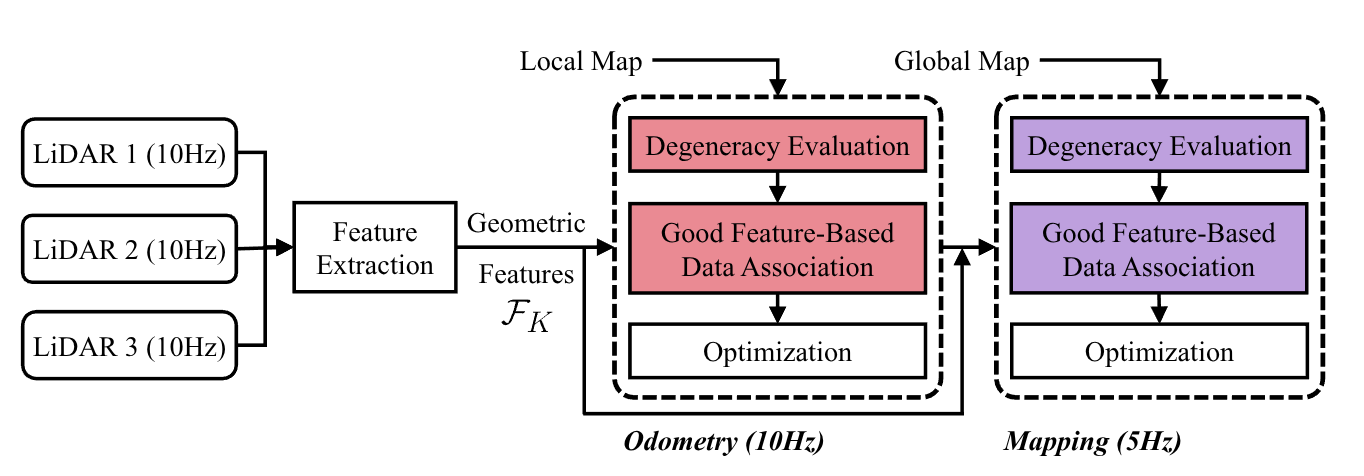
- Robust odometry and mapping for multi-lidar systems with online extrinsic calibration
IEEE Transactions on Robotics, 2021
Authors: Jiao, Jianhao; Ye, Haoyang; Zhu, Yilong; Liu, Ming;
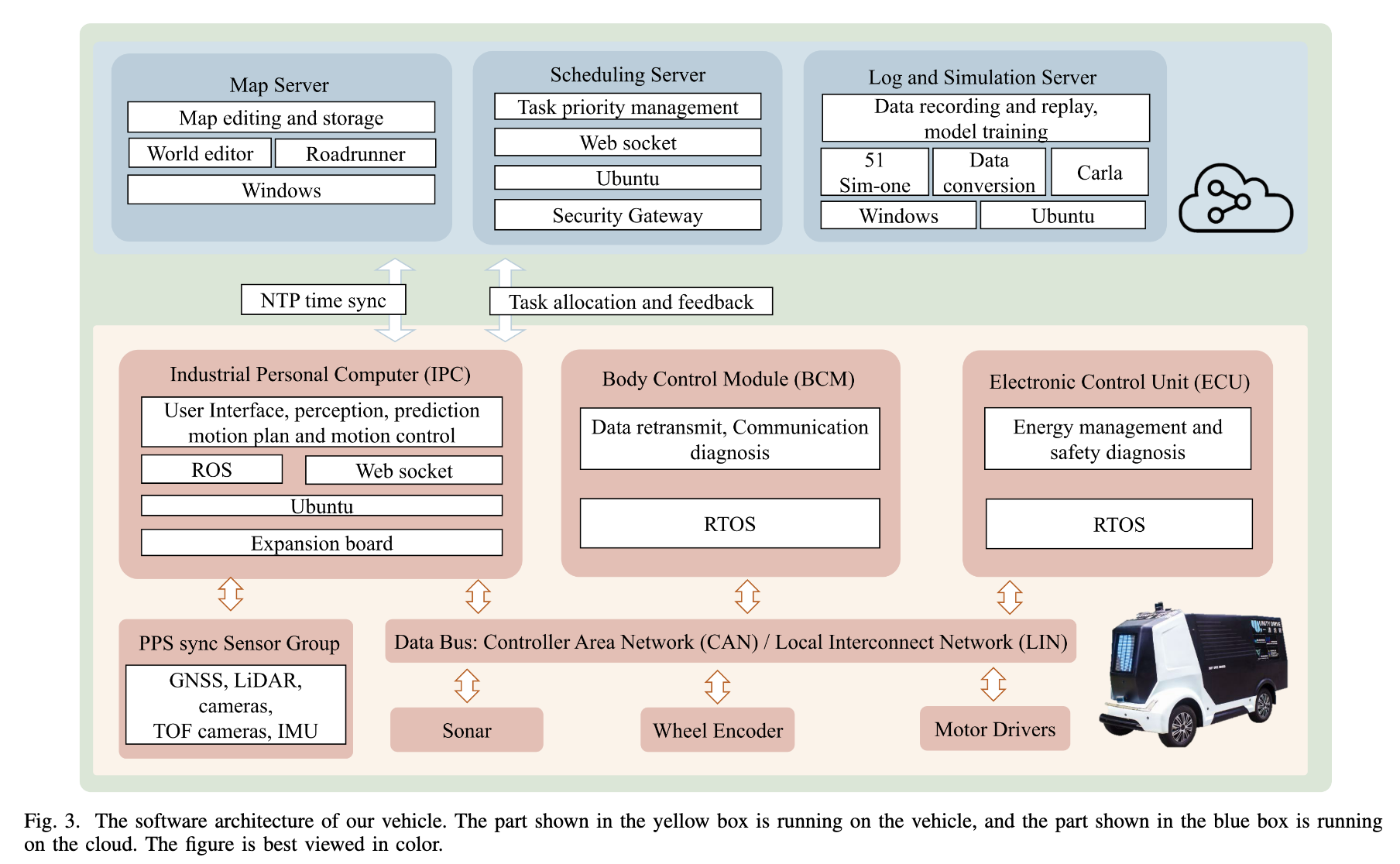
- The role of the hercules autonomous vehicle during the covid-19 pandemic: An autonomous logistic vehicle for contactless goods transportation
IEEE Robotics & Automation Magazine, 2021
Authors: Liu, Tianyu; hai Liao, Qing; Gan, Lu; Ma, Fulong; Cheng, Jie; Xie, Xupeng; Wang, Zhe; Chen, Yingbing; Zhu, Yilong; Zhang, Shuyang;
- Globally optimal symbolic hand-eye calibration
IEEE/ASME Transactions on Mechatronics, 2020
Authors: Wu, Jin; Liu, Ming; Zhu, Yilong; Zou, Zuhao; Dai, Ming-Zhe; Zhang, Chengxi; Jiang, Yi; Li, Chong;
- Circuit Synthesis of 3-D Rotation Orthonormalization
IEEE Transactions on Circuits and Systems II: Express Briefs, 2020
Authors: Wu, Jin; Jiang, Yi; Li, Chong; Sun, Ran; Zhang, Chengxi; Yu, Yang; Zhu, Yilong; Liu, Ming;
- Linear geometric algebra rotor estimator for efficient mesh deformation
IET Cyber‐Systems and Robotics, 2020
Authors: Wu, Jin; Lopez, Mauricio; Liu, Ming; Zhu, Yilong;
Conferences
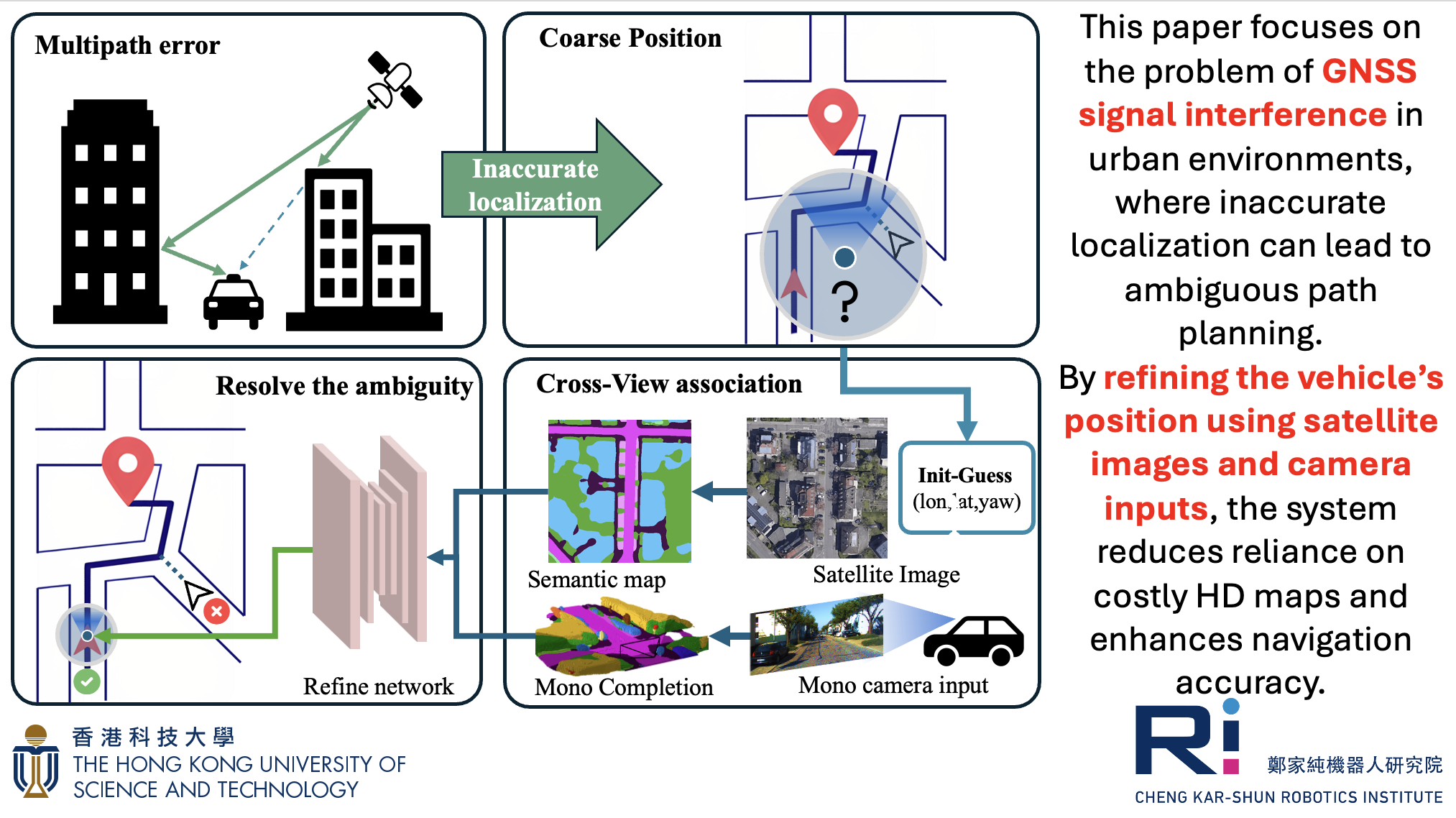
- From satellite to street: Semantic and depth information for enhanced geo-localization
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025) ORAL.
Authors: Zhu, Yilong, Jianhao Jiao, Hexiang Wei, Jin Wu, Bohuan Xue, Shuyang Zhang, and Shaojie Shen.
- Fusionportable: A multi-sensor campus-scene dataset for evaluation of localization and mapping accuracy on diverse platforms
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Authors: Jiao, Jianhao; Wei, Hexiang; Hu, Tianshuai; Hu, Xiangcheng; Zhu, Yilong; He, Zhijian; Wu, Jin; Yu, Jingwen; Xie, Xupeng; Huang, Huaiyang;
- Comparing representations in tracking for event camera-based slam
Proceedings of the IEEE/cvf conference on computer vision and pattern recognition, 2021
Authors: Jiao, Jianhao; Huang, Huaiyang; Li, Liang; He, Zhijian; Zhu, Yilong; Liu, Ming;
- Differential information aided 3-d registration for accurate navigation and scene reconstruction
2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
Authors: Wu, Jin; Zhang, Shuyang; Zhu, Yilong; Geng, Ruoyu; Fu, Zhongtao; Ma, Fulong; Liu, Ming;
- Greedy-based feature selection for efficient LiDAR SLAM
2021 IEEE international conference on robotics and automation (ICRA), 2021
Authors: Jiao, Jianhao; Zhu, Yilong; Ye, Haoyang; Huang, Huaiyang; Yun, Peng; Jiang, Linxin; Wang, Lujia; Liu, Ming;
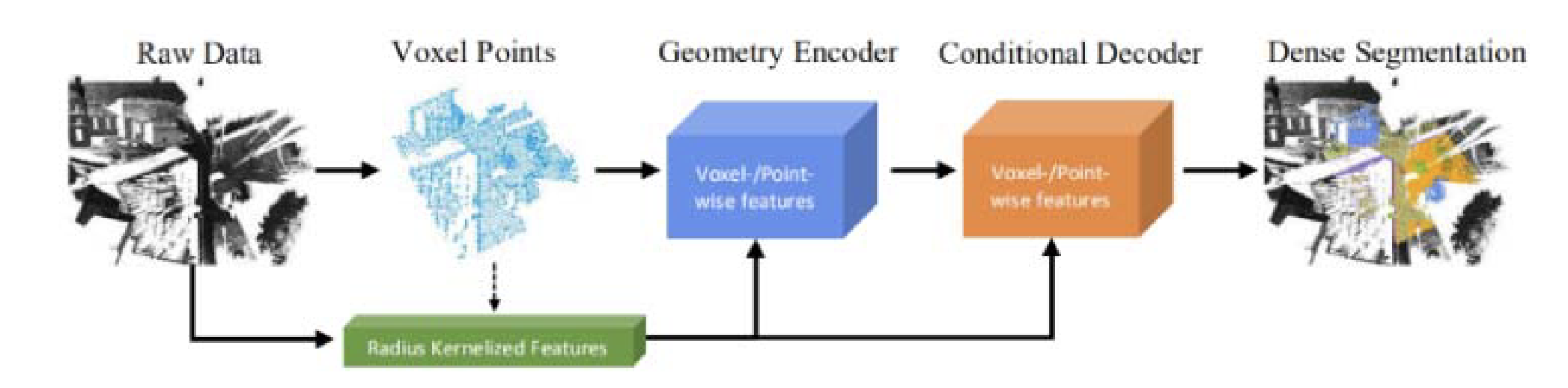
- GIDSeg: Learning 3D Segmentation from Sparse Annotations via Hierarchical Descriptors
2020 2nd International Conference on Information Technology and Computer Application (ITCA), 2020
Authors: Yi-Ge, Ellen; Zhu, Yilong;
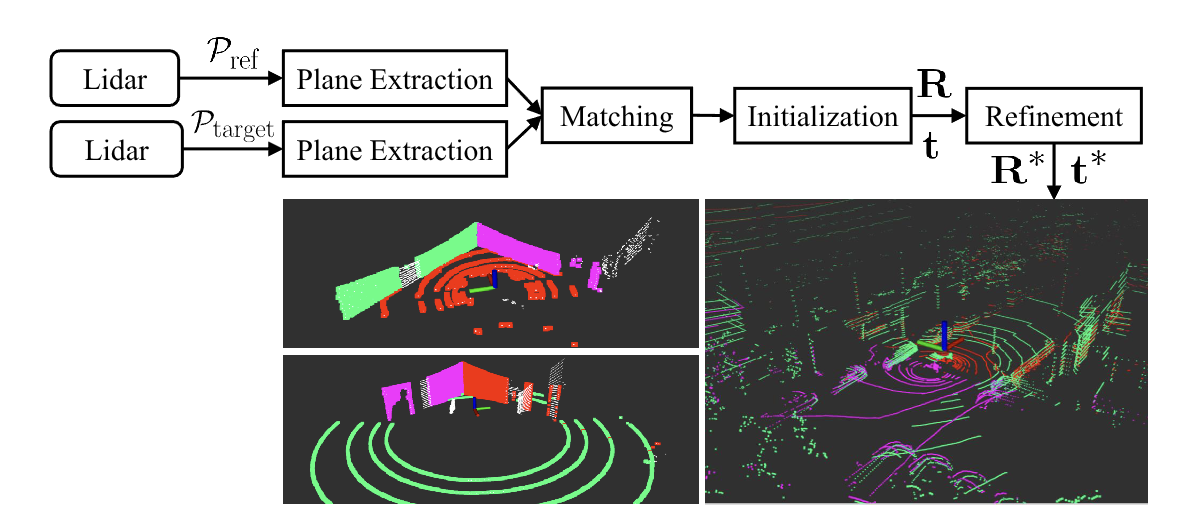
- A novel dual-lidar calibration algorithm using planar surfaces
2019 IEEE Intelligent Vehicles Symposium (IV), 2019
Authors: Jiao, Jianhao; Liao, Qinghai; Zhu, Yilong; Liu, Tianyu; Yu, Yang; Fan, Rui; Wang, Lujia; Liu, Ming;
- A triangle feature based map-to-map matching and loop closure for 2d graph slam
2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2019
Authors: Jiang, Binqian; Zhu, Yilong; Liu, Ming;
- A robust pavement mapping system based on normal-constrained stereo visual odometry
2019 IEEE International Conference on Imaging Systems and Techniques (IST), 2019
Authors: Huang, Huaiyang; Fan, Rui; Zhu, Yilong; Liu, Ming; Pitas, Ioannis;
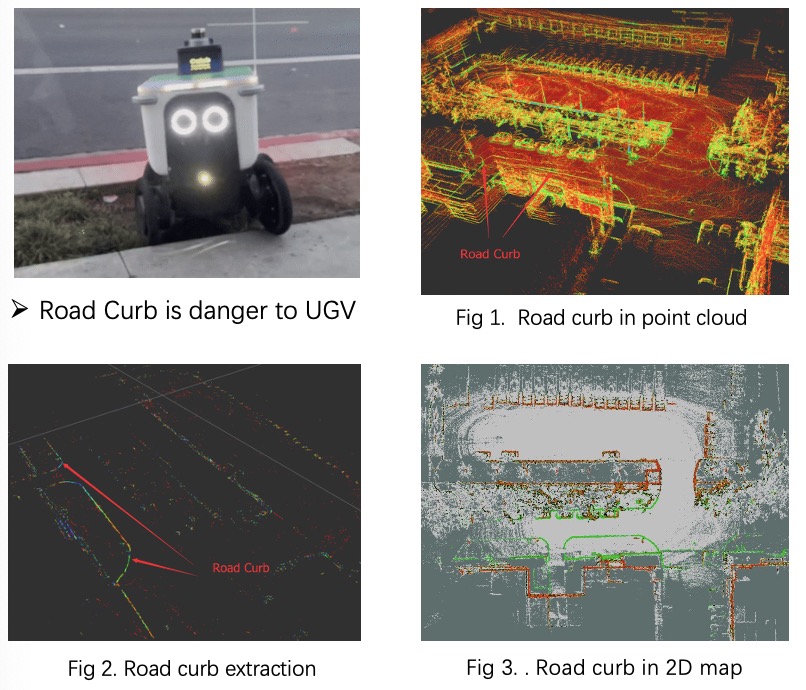
- [Best paper finalist]Road curb detection using a novel tensor voting algorithm
2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2019
Authors: Zhu, Yilong; Han, Dong; Xue, Bohuan; Jiao, Jianhao; Zou, Zuhao; Liu, Ming; Fan, Rui;
- Real-time binocular vision implementation on an soc tms320c6678 dsp
International Conference on Computer Vision Systems, 2019
Authors: Fan, Rui; Duanmu, Sicheng; Liu, Yanan; Zhu, Yilong; Jiao, Jianhao; Bocus, Mohammud Junaid; Yu, Yang; Wang, Lujia; Liu, Ming;
- Robust lane marking detection algorithm using drivable area segmentation and extended SLT
2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2019
Authors: Ozgunalp, Umar; Fan, Rui; Cheng, Shanshan; Sun, Yuxiang; Zuo, Weixun; Zhu, Yilong; Xue, Bohuan; Zheng, Linwei; Liang, Qing; Liu, Ming;
- Automatic calibration of dual-LiDARs using two poles stickered with retro-reflective tape
2019 IEEE International Conference on Imaging Systems and Techniques (IST), 2019
Authors: Xue, Bohuan; Jiao, Jianhao; Zhu, Yilong; Zhen, Linwei; Han, Dong; Liu, Ming; Fan, Rui;
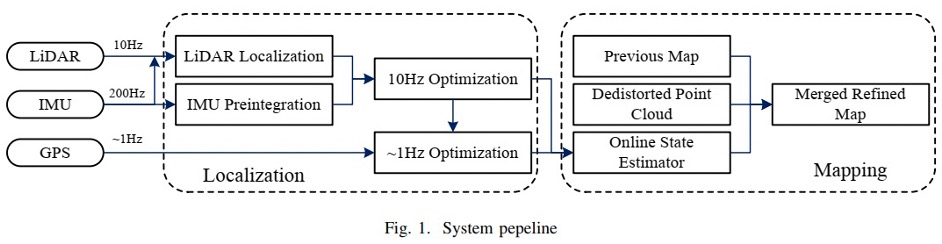
- Low-cost gps-aided lidar state estimation and map building
2019 IEEE International Conference on Imaging Systems and Techniques (IST), 2019
Authors: Zheng, Linwei; Zhu, Yilong; Xue, Bohuan; Liu, Ming; Fan, Rui;
- Autonomous UAV landing system based on visual navigation
2019 IEEE International Conference on Imaging Systems and Techniques (IST), 2019
Authors: Wu, Zhixin; Han, Peng; Yao, Ruiwen; Qiao, Lei; Zhang, Weidong; Shen, Tielong; Sun, Min; Zhu, Yilong; Lin, Ming; Fan, Rui;
- Real-time, environmentally-robust 3d lidar localization
2019 IEEE International Conference on Imaging Systems and Techniques (IST), 2019
Authors: Zhu, Yilong; Xue, Bohuan; Zheng, Linwei; Huang, Huaiyang; Liu, Ming; Fan, Rui;
- Road crack detection using deep convolutional neural network and adaptive thresholding
2019 IEEE Intelligent Vehicles Symposium (IV), 2019
Authors: Fan, Rui; Bocus, Mohammud Junaid; Zhu, Yilong; Jiao, Jianhao; Wang, Li; Ma, Fulong; Cheng, Shanshan; Liu, Ming;
Others
-
Supplementary material to: Robust odometry and mapping for multi-LiDAR systems with online extrinsic calibration , 2020
Authors: Jiao, Jianhao; Ye, Haoyang; Zhu, Yilong; Liu, Ming;
Ongoing Project
- I explore the integration of fast reactive modules (for perception and control) with slow semantic planners that leverage satellite imagery, vision-language models (VLMs), and onboard camera views to achieve long-horizon, cross-modal navigation. This enables the system to generate early, semantically guided instructions before approaching complex urban intersections. (Supervised by Prof. Shaojie Shen)