Awards
- Oct 2019:ROBIO
Best Paper Finalist
Patents
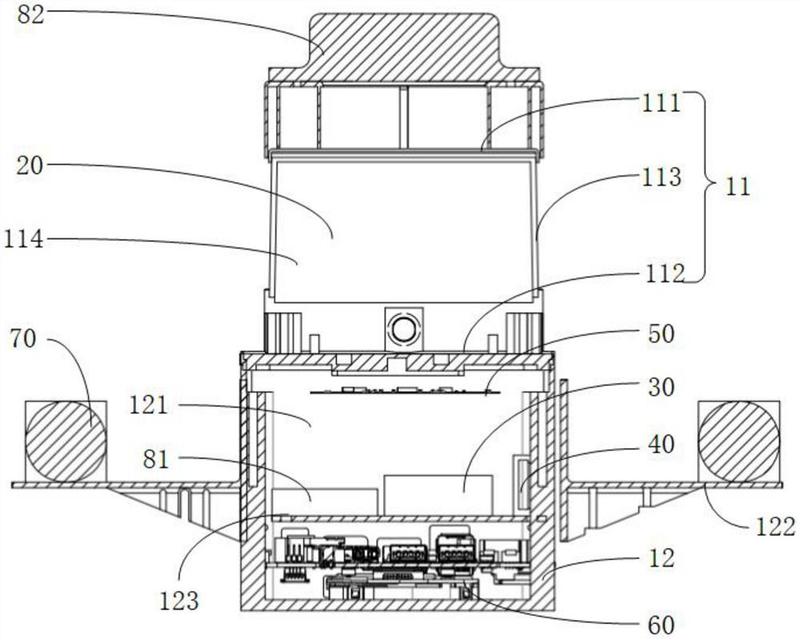
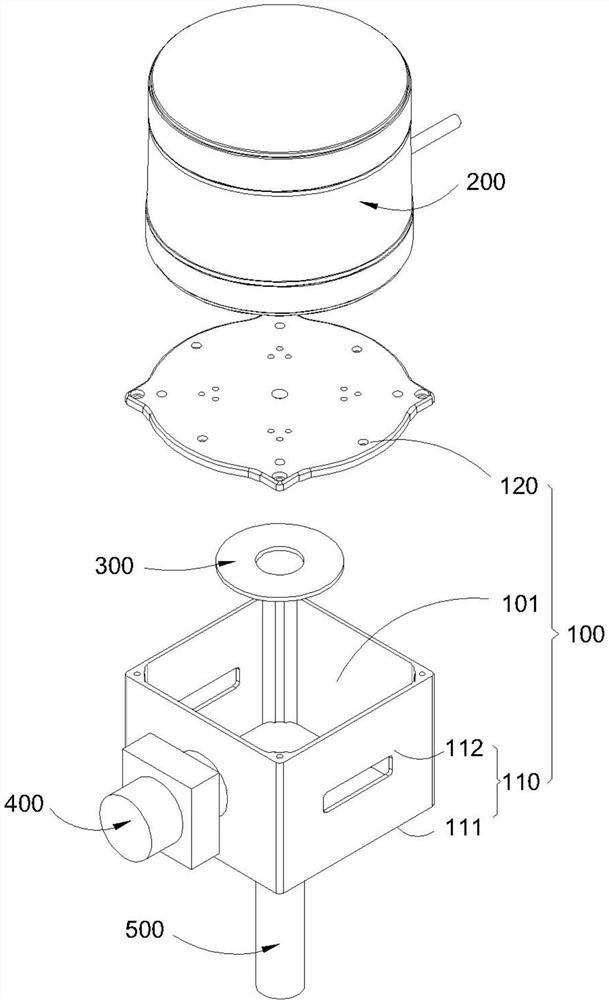
- Chinese patent: A mapping system.
- Publication number: CN215953854U (2021.07.30)
- Abstract: This utility model relates to the field of simultaneous localization and mapping (SLAM) technology, and particularly discloses a mapping device. It integrates LiDAR, RTK positioning, IMU, camera, synchronization modules, and an industrial computer into a unified housing for multi-sensor data acquisition.
- Chinese patent: LiDAR modules and vehicles.
- Publication number: CN217787370U (2021.05.11)
- Abstract: This utility model discloses a radar module and vehicle design that allows indirect acquisition of motion information for radar through sensor-mounted structures, solving challenges in radar motion status estimation.
- Chinese patent: Vehicle positioning method, device, readable storage medium and computer equipment
- Publication number: CN111161353A (2019.12.31)
- Abstract:Describes a vehicle localization method that fuses multiple radar scans and pose predictions for improved frame registration and accurate pose estimation under real-time conditions.
- Chinese patent: Map generation method, device, computer device, and storage medium
- Publication number: CN111207762A (2019.12.31)
- Abstract:Proposes a point cloud processing pipeline involving distortion correction, eigenvalue analysis, map filtering, and registration to improve overall map accuracy.
- Chinese patent: Unmanned vehicle control methods, devices, systems and carrying equipment
- Publication number: CN109947103A (2019.03.18)
- Abstract:Introduces a real-time autonomous driving control system using multiple sensor data streams to generate global maps, estimate current pose, and plan motion with predictive control.
- Chinese patent: Roadside detection method, device, computer equipment and storage mediums
- Publication number: CN108957432A (2018.04.09)
- Abstract:Describes a curb detection technique using multi-scan laser data and tensor voting to extract curb features with high robustness against noise.
- Chinese patent: Extrinsic Calibration Method and Device, Imaging System, and Computer-Readable Medium
- Publication number: CN117808884A (2024.04.02)
- Abstract:Introduces a multi-sensor extrinsic calibration method using angular features from LiDAR, frame cameras, and event cameras to estimate rotation and translation parameters for accurate sensor alignment.
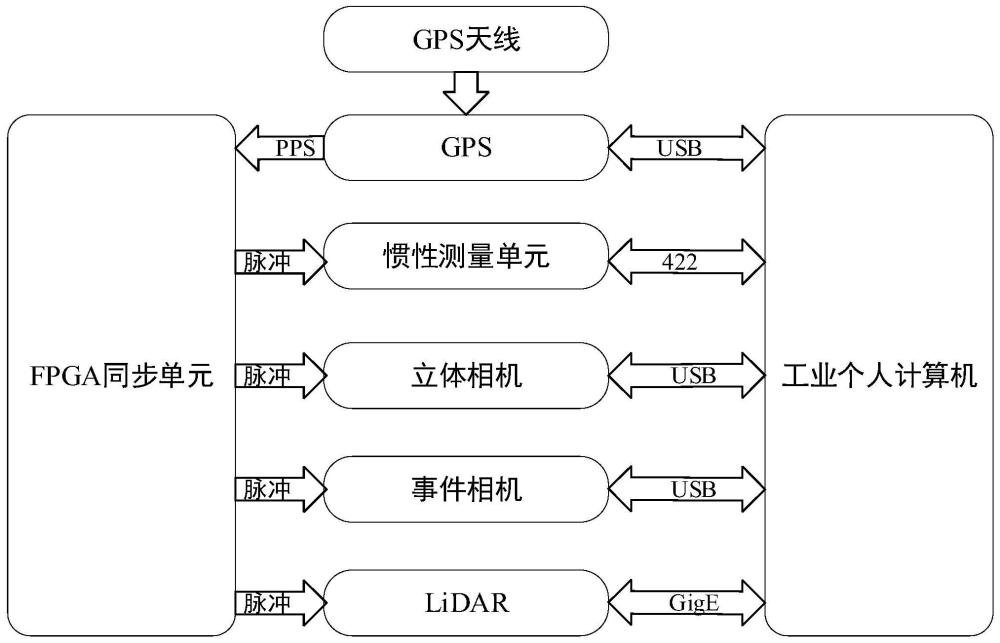
- Chinese patent: Multi-Sensor Clock Synchronization System and Method
- Publication number: CN117749307A (2024.03.22)
- Abstract:Proposes a clock synchronization system that uses second pulse generation and phase-locked frequency multiplication to trigger heterogeneous sensors synchronously.